Abstand Von Punkt Zu Gerade
Der Abstand zwischen einem Punkt und einer Geraden ist ein fundamentales Konzept in der Geometrie und findet in vielen Bereichen der Mathematik, Physik und Technik Anwendung. Er beschreibt die kürzeste Entfernung von einem gegebenen Punkt zu einer gegebenen Geraden. In diesem Artikel werden wir die Grundlagen dieses Konzepts erläutern, verschiedene Berechnungsmethoden vorstellen und einige praktische Anwendungen aufzeigen.
Grundlagen des Abstands zwischen Punkt und Gerade
Was ist der Abstand?
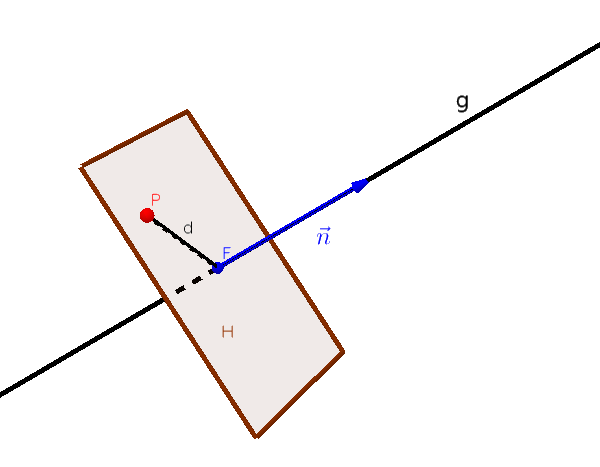
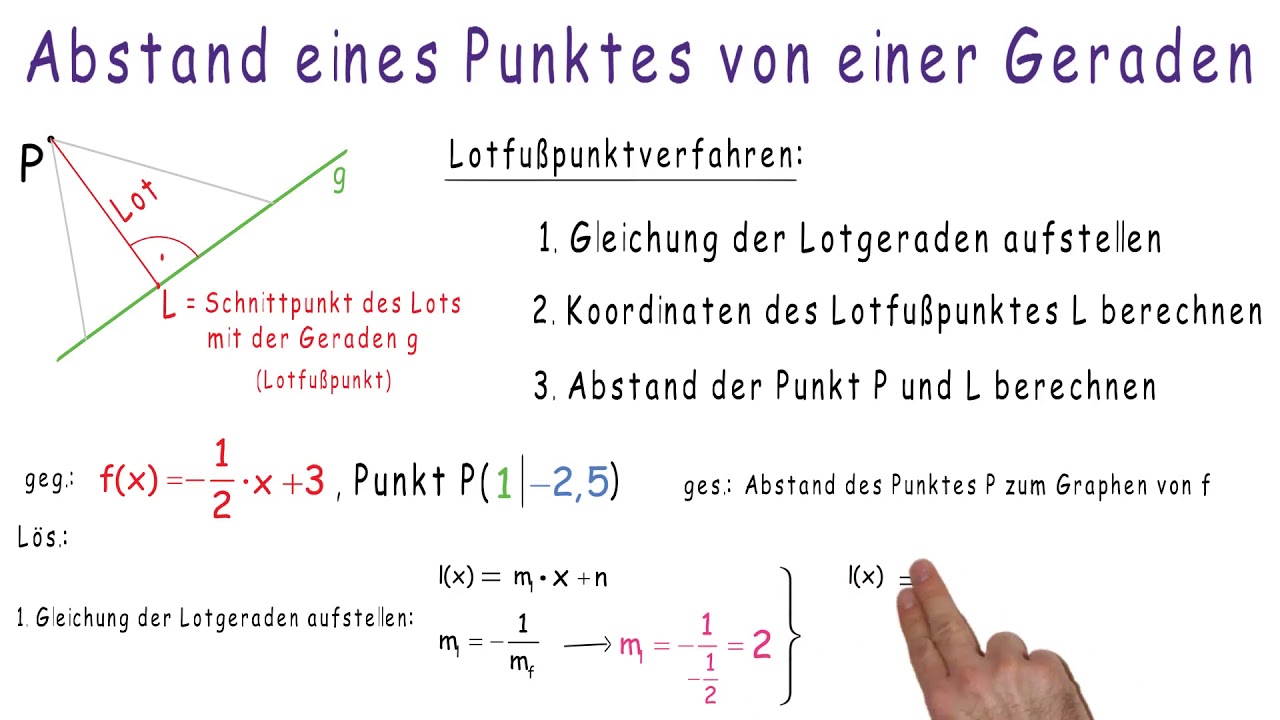
Der Abstand zwischen einem Punkt und einer Geraden ist definiert als die Länge des Lotfußpunktes vom Punkt auf die Gerade. Das bedeutet, wir suchen die kürzeste Verbindungslinie vom Punkt zur Geraden, und diese Verbindungslinie steht immer senkrecht auf der Geraden. Diese senkrechte Verbindungslinie wird auch als Lot bezeichnet.
Warum ist der Abstand wichtig?
Die Berechnung des Abstands ist wichtig, um verschiedene Probleme zu lösen. Beispielsweise in der Navigation, um den Abstand eines Schiffes oder Flugzeugs von einer Küstenlinie oder Flugroute zu bestimmen. In der Robotik kann der Abstand genutzt werden, um Hindernissen auszuweichen. Auch in der Computergrafik spielt er eine Rolle bei der Kollisionserkennung und der Berechnung von Schatten.
Darstellung von Geraden
Um den Abstand zwischen einem Punkt und einer Geraden berechnen zu können, müssen wir die Gerade mathematisch darstellen. Es gibt verschiedene Möglichkeiten, eine Gerade zu beschreiben:
- Parameterform: g: x = p + t * v, wobei p ein Punkt auf der Geraden ist, v der Richtungsvektor und t ein Parameter.
- Normalenform: g: n * (x - p) = 0, wobei n der Normalenvektor der Geraden ist und p wieder ein Punkt auf der Geraden.
- Koordinatenform (in der Ebene): g: ax + by + c = 0, wobei a, b, c Konstanten sind und x, y die Koordinaten eines Punktes auf der Geraden.
Die Wahl der Darstellung hängt oft von der gegebenen Information und der Art des Problems ab.
Berechnung des Abstands
Abstand in der Ebene (2D)
Die Berechnung des Abstands zwischen einem Punkt P(x0, y0) und einer Geraden g: ax + by + c = 0 in der Ebene kann mit folgender Formel erfolgen:
d(P, g) = |ax0 + by0 + c| / √(a2 + b2)
Diese Formel ist direkt aus der Hesseschen Normalform der Geradengleichung abgeleitet.
Beispiel: Gegeben sei der Punkt P(2, 3) und die Gerade g: 3x + 4y - 5 = 0. Der Abstand beträgt:
d(P, g) = |(3 * 2) + (4 * 3) - 5| / √(32 + 42) = |6 + 12 - 5| / √25 = 13 / 5 = 2.6
Abstand im Raum (3D)
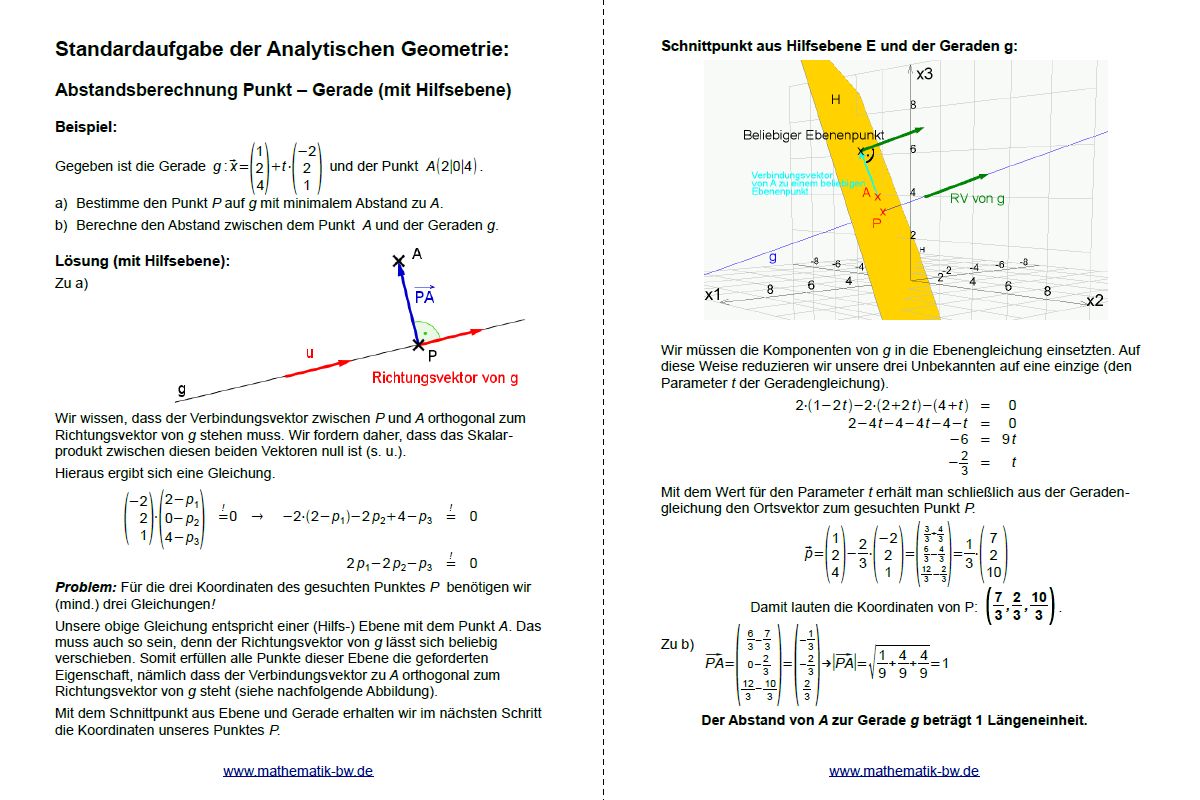
Die Berechnung des Abstands zwischen einem Punkt P und einer Geraden g im Raum ist etwas komplexer. Wir können die Parameterform der Geraden verwenden: g: x = p + t * v, wobei p ein Punkt auf der Geraden ist und v der Richtungsvektor.
Der Abstand lässt sich berechnen, indem man den Lotfußpunkt L auf der Geraden findet, für den der Vektor PL senkrecht zum Richtungsvektor v der Geraden steht. Das Skalarprodukt von PL und v muss also Null sein: PL * v = 0.
Sei L = p + t * v der Lotfußpunkt. Dann ist PL = L - P = (p + t * v) - P.
Die Bedingung PL * v = 0 führt zu folgender Gleichung:
((p + t * v) - P) * v = 0
Diese Gleichung kann nach t aufgelöst werden:
t = ((P - p) * v) / (v * v)
Sobald t bekannt ist, kann der Lotfußpunkt L berechnet werden. Der Abstand ist dann die Länge des Vektors PL:
d(P, g) = |PL| = |L - P|
Alternativ kann man auch das Vektorprodukt verwenden:
d(P, g) = |(P - p) x v| / |v|
Hierbei ist x das Kreuzprodukt und |v| die Länge des Vektors v.
Beispiel: Gegeben sei der Punkt P(1, 2, 3) und die Gerade g: x = (0, 0, 0) + t * (1, 1, 1). Hier ist p = (0, 0, 0) und v = (1, 1, 1).
t = ((P - p) * v) / (v * v) = ((1, 2, 3) * (1, 1, 1)) / ((1, 1, 1) * (1, 1, 1)) = (1 + 2 + 3) / (1 + 1 + 1) = 6 / 3 = 2
L = (0, 0, 0) + 2 * (1, 1, 1) = (2, 2, 2)
PL = L - P = (2, 2, 2) - (1, 2, 3) = (1, 0, -1)
d(P, g) = |PL| = √(12 + 02 + (-1)2) = √2
Anwendungen in der Praxis
Navigation
In der Schifffahrt und Luftfahrt ist die Berechnung des Abstands zu einer Geraden (z.B. einer Küstenlinie oder einer Flugroute) von entscheidender Bedeutung. Navigationssysteme nutzen diese Berechnungen, um sicherzustellen, dass sich ein Fahrzeug auf dem richtigen Kurs befindet und nicht in gefährliche Bereiche gerät. Zum Beispiel kann ein Schiff seinen Abstand zu einer Küstenlinie berechnen, um eine sichere Entfernung einzuhalten und Kollisionen mit dem Ufer zu vermeiden.
Robotik
In der Robotik wird der Abstand zwischen einem Roboter und Hindernissen in seiner Umgebung ständig berechnet. Dies ermöglicht es dem Roboter, sich sicher zu bewegen und Kollisionen zu vermeiden. Roboterarme in der Fertigung nutzen Abstandsdaten, um präzise Operationen durchzuführen, ohne mit anderen Komponenten zu kollidieren.
Computergrafik
In der Computergrafik spielt die Abstandsberechnung eine wichtige Rolle bei der Kollisionserkennung. Wenn zwei Objekte sich in einer virtuellen Umgebung bewegen, muss das System erkennen, wann sie kollidieren. Dies geschieht, indem der Abstand zwischen den Objekten berechnet wird. Wenn der Abstand kleiner als ein bestimmter Schwellenwert ist, wird eine Kollision detektiert. Außerdem wird es für das Raytracing benötigt, um herauszufinden, welcher Punkt in einer Szene von einem Lichtstrahl getroffen wird und dann kann es für die Berechnung von realistischen Schatten und Reflexionen verwendet werden.
Geographische Informationssysteme (GIS)
GIS verwenden Abstandsanalysen für eine Vielzahl von Anwendungen, von der Standortplanung bis zur Notfallplanung. Beispielsweise kann man den Abstand zwischen einem Haus und dem nächsten Feuerwehrhaus berechnen, um die Reaktionszeit im Notfall zu bestimmen. Oder man kann den Abstand zwischen einem potenziellen Standort für ein neues Geschäft und den Wohnorten der Kunden berechnen, um die Erreichbarkeit zu analysieren.
Statistik und Datenanalyse
In der Statistik kann der Abstand zwischen einem Datenpunkt und einer Regressionsgeraden verwendet werden, um die Residuen zu berechnen. Diese Residuen geben Aufschluss darüber, wie gut die Regressionsgerade die Datenpunkte approximiert. Ein kleiner Abstand deutet auf eine gute Anpassung hin, während ein großer Abstand auf eine schlechte Anpassung hindeutet.
Herausforderungen und Erweiterungen
Umgang mit ungenauen Daten
In der Praxis sind die Daten, die zur Berechnung des Abstands verwendet werden, oft ungenau. Dies kann zu Fehlern in der Abstandsberechnung führen. Es ist daher wichtig, die Genauigkeit der Daten zu berücksichtigen und gegebenenfalls Methoden zur Fehlerkorrektur anzuwenden. Filterung und Glättungstechniken können helfen, den Einfluss von Rauschen und Ungenauigkeiten zu reduzieren.
Komplexe Geometrien
Die hier beschriebenen Methoden gelten hauptsächlich für einfache Geraden und Punkte. Bei komplexeren Geometrien, wie z.B. gekrümmten Linien oder Flächen, sind fortgeschrittenere Techniken erforderlich, wie z.B. Splines oder Oberflächenmodelle. Die Berechnung des Abstands zu einer komplexen Kurve erfordert oft iterative numerische Verfahren.
Dynamische Szenarien
In dynamischen Szenarien, in denen sich der Punkt oder die Gerade bewegt, muss der Abstand kontinuierlich neu berechnet werden. Dies erfordert effiziente Algorithmen, die in Echtzeit arbeiten können. Vor allem in der Robotik und in autonomen Fahrzeugen ist dies eine große Herausforderung.
Zusammenfassung
Der Abstand zwischen einem Punkt und einer Geraden ist ein grundlegendes Konzept mit vielfältigen Anwendungen. Die Berechnungsmethoden variieren je nach Dimension und Darstellung der Geraden. In der Praxis sind Genauigkeit, Effizienz und der Umgang mit komplexen Geometrien wichtige Herausforderungen. Das Verständnis und die Anwendung dieser Konzepte sind essentiell für viele Bereiche der Mathematik, Physik, Technik und Informatik.
Call to action: Üben Sie die Berechnung des Abstands mit verschiedenen Beispielen und Programmen, um Ihr Verständnis zu vertiefen. Erforschen Sie fortgeschrittene Techniken für komplexe Geometrien und dynamische Szenarien. Entdecken Sie die vielfältigen Anwendungen in Ihrem eigenen Interessensgebiet!